Robot à grande vitesse
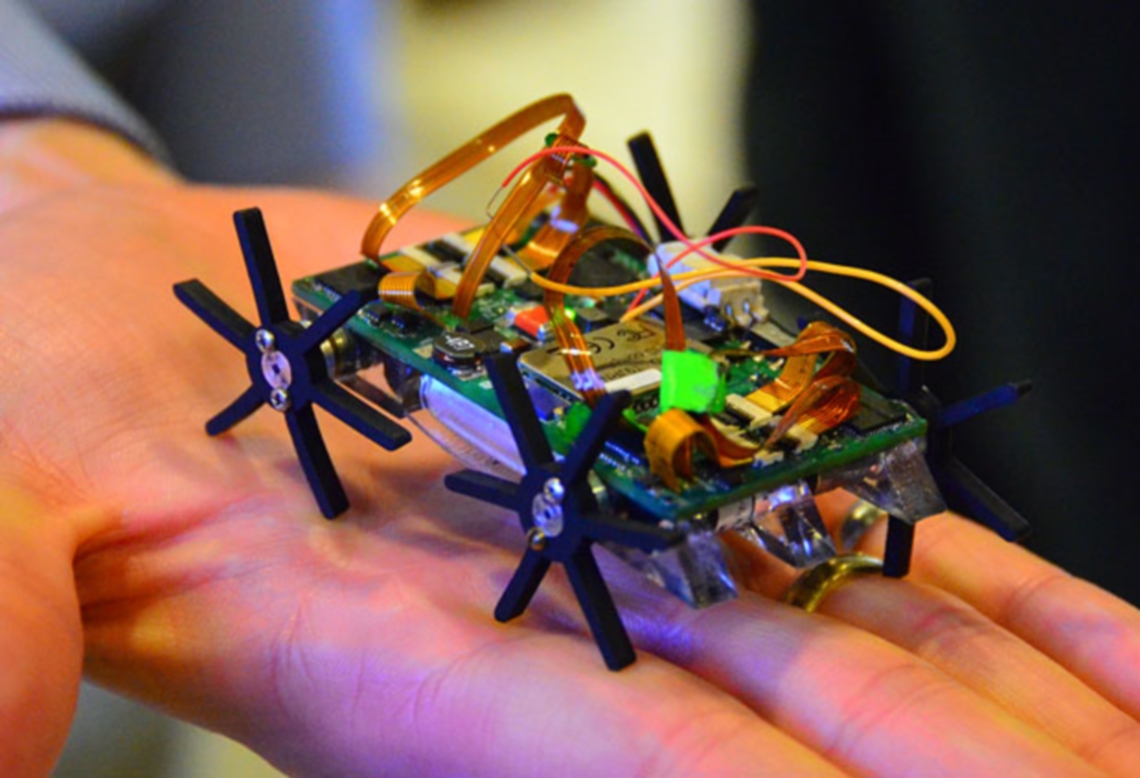
Dans une vidéo récente au titre peu évocateur de « l’efficacité et de l’analyse de l’efficacité d’un nouveau robot quadrupède autonome », des chercheurs de l’Université du Maryland et de John Hopkins montrent un robot miniature muni de moteurs indépendants propulsant ses quatre pattes, hybrides entre la roue et la jambe. Il peut atteindre jusqu’à 30 fois la longueur de son corps par seconde, soient environ 2,2 m/s. A l’échelle humaine, il atteindrait environ 190 km/h. Comme le montre la vidéo, le robot n’est pas simplement rapide, mais aussi capable de monter sur des obstacles et d’avoir un rayon de braquage nul. Les prochaines évolutions devraient le rendre encore plus rapide. Chacune de ses roues est actuellement munie de 6 rayons. Il est prévu de n’en laisser qu’un. L’un des chercheurs, Christopher Brown a déclaré « Continuez à suivre nos recherches et vous verrez un véritable quadrupède réaliser les différents pas (marche / trot / galop / saut) ! » . La vidéo : http://www.youtube.com/watch?v=-0LQd4Mk42o
Tu ne seras pas un homme, mon robot

Julia Fink, de l’EPFL, a publié une étude sur les interactions homme-robots. Un aspirateur Roomba a été confié à 9 foyers pendant 6 mois. Si au début, il est l’objet de curiosité, peut recevoir un nom, être personnalisé, pris en photos et observé pendant son travail, les résultats contredisent la pensée dominante qui veut que les utilisateurs projettent des caractères humains sur leur robot : il reste principalement perçu comme un aspirateur. Par contre, si avant son arrivée, le ménage est surtout une affaire de femme, tout le monde utilise le robot et le ménage, habituellement réalisé le dimanche se fait désormais n’importe quand. La chercheuse a parcouru les forums pour extraire les termes anthropomorphiques et a fait la comparaison avec l’iPad et Aibo. Les termes anthropomorphiques sont très courants pour le chien robot (56 %) mais moins avec Roomba (11 %) et l’iPad (2 %). Julia Fink note que Roomba n’évolue pas et implique peu d’interaction physique, deux points plus importants pour favoriser l’interaction que l’apparence de l’appareil.
Projet XCR, pour un robot qui apprend

Le projet XCR (eXperimental Cognitive Robot) développé par Pentti Haikonen, de l’Université de Sprigfield abandonne la programmation des bases comportementales du robot. Pour Haikonen, l’interprétation du monde à travers le langage conscient ne s’impose pas en premier lieu au cerveau humain. Ce sont les objets ou les sensations physiques qui sont perçus par le corps et le cerveau. De même pour XCR, le robot réagit non grâce à un logiciel prédéfini, mais à la façon dont ses composants physiques reçoivent l’interaction avec le milieu extérieur. Petit robot mobile, a été construit de telle sorte que, lorsqu’il est frappé, il s’arrête et recule. Il s’agit d’un réflexe d’évitement. Le robot est aussi capable d’apprentissage. S’il tient un objet bleu lorsqu’il est frappé, il associera ensuite cette couleur à la « douleur » et l’évitera. Selon ses concepteurs, rien n’empêche d’élargir la gamme des réactions physiquement acquises au contact de l’environnement.
Et une main qui apprend également
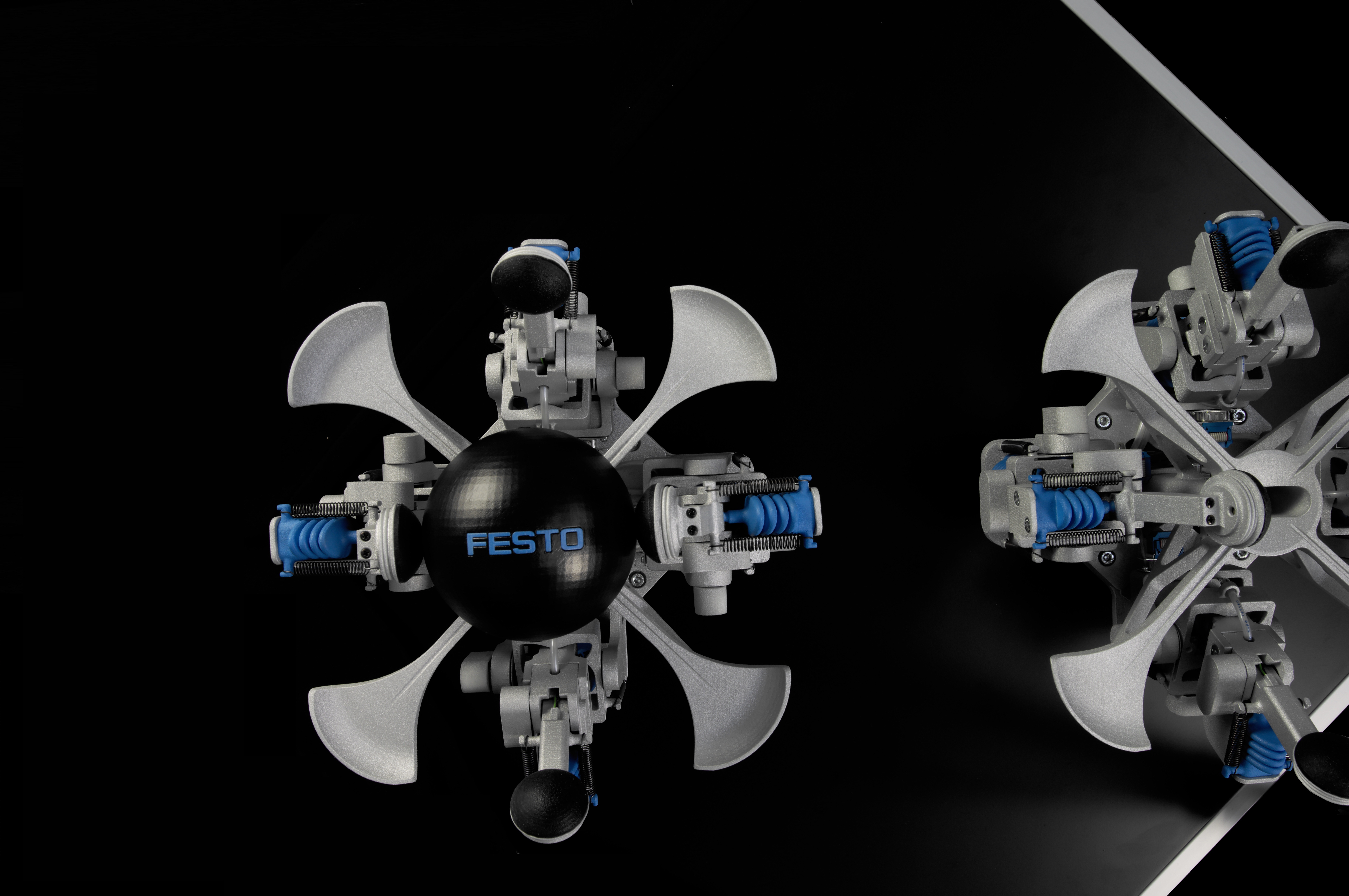
Festo a créé LearningGripper, une pince à actionnement pneumatique qui apprend seule la forme d’un objet pour l’orienter précisément. C’est la naissance d’une nouvelle génération de robots, plus flexibles que les systèmes de production d’aujourd’hui, plus rapides et plus faciles à mettre en place. En démonstration, LearningGripper apprennait à gérer une boule et à l’orienter pour diriger le logo de Festo dans une direction spécifique. « Aujourd’hui, une énorme quantité de temps et d’énergie va dans la programmation » a déclaré Richard Huss, président de la direction. «Configuration et programmation sont les principaux facteurs de coûts pour les constructeurs de machines. LearningGripper prévigure un temps où ces coûts seront diminués. Les nouvelles machines optimiseront leur propre performance. » Les algorithmes d’apprentissage prennent la place d’une programmation très complexe. LearningGripper retient des séquences de mouvements grâce à l’apprentissage par renforcement.
Robots au long cours
Lors de la compétition SailBot 2013, 16 équipes du monde entier étaient en compétition pour construire des voiliers ne nécessitant aucune intervention humaine pour naviguer. Ils présentent un défi intéressant car ils exigent la prise en compte de données en temps réel pour réagir à des conditions environnementales changeantes. «La voile est un problème intéressant parce que vous ne pouvez pas simplement orienter des moteurs pour aller dans la direction souhaitée », a déclaré Brooks Willis, chef de projet pour Olin College. « Peu de recherches ont été faites dans ce sens. » Tous les bateaux avaient des capteurs de direction de vent et des boussoles mais manquaient de matériel de pointe (caméras ou télémètres). « Aucun des bateaux de cette année n’était conscient de son environnement», a déclaré Willis. Dans les années à venir, il s’attend à un niveau supérieur de sophistication qui rendra les bateaux plus conscients de la situation. «Le grand défi des équipes est de trouver ce que le robot fait quand il fonctionne mais qu’il ne fait pas ce qu’elles attendaient ».
Atlas : premières images
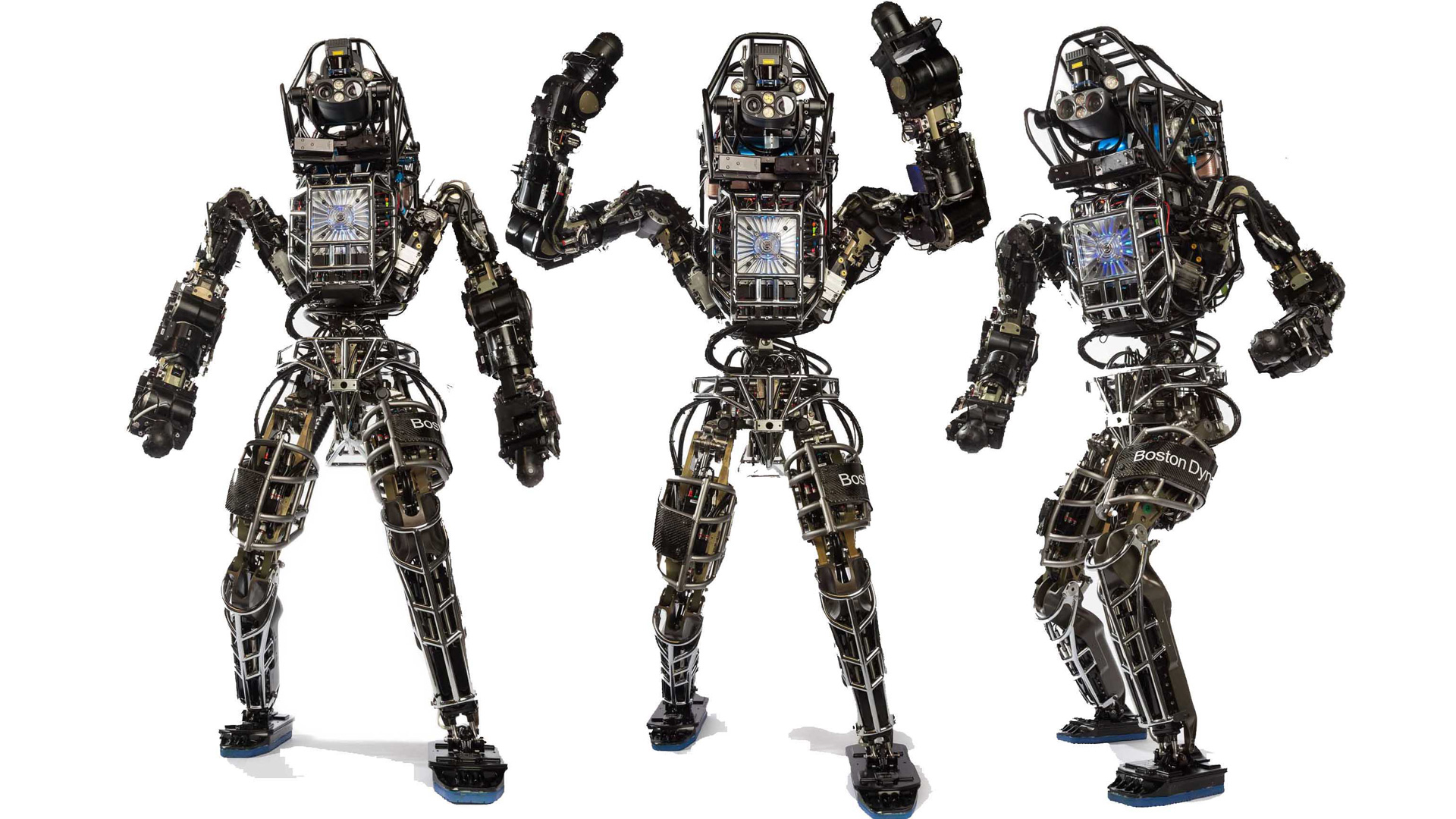
Boston Dynamics a dévoilé le robot ATLAS dans le cadre du défi robotique DARPA. ATLAS mesure 1,88 m et pèse 150 kg. Il est équipé d’articulation à actionnement hydraulique, d’un ordinateur de contrôle embarqué, d’un module de gestion thermique, de caméras stéréo et d’un télémètre laser.ATLAS est conçu pour faire ce que font les humains pendant les opérations d’intervention lors de catastrophes. Les sept équipes sélectionnées à l’issue du défi de robotique virtuelle sont chargées de le programmer pour réaliser des actions dans un scénario catastrophe. Le prix de la finale, dans un an est de prix de 2 M $. Doué d’une grande mobilité, le robot humanoïde est conçu pour travailler en extérieure sur des terrains accidentés. Atlas a une marche bipède qui laisse ses bras libres de soulever, transporter et manipuler les objets. Il sait coordonner ses mains et ses pieds pour avancer et choisir son chemin à travers les espaces encombrés. Ses mains, créées par iRobot et Sandia National Labs lui permettent d’utiliser des outils conçus pour l’usage humain.
E-David : un artiste est né
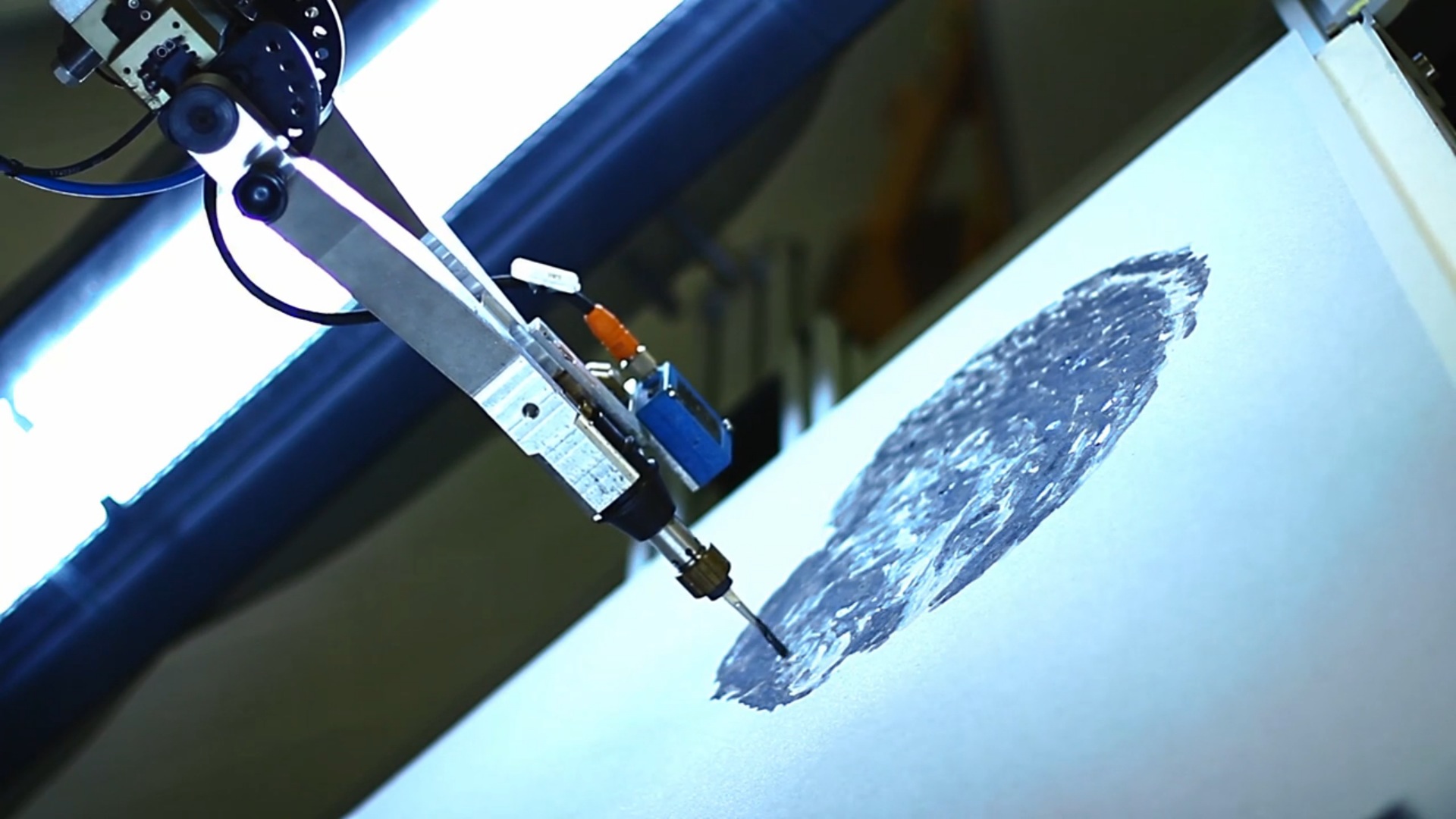
Des chercheurs de l’université de konstanz ont construit un robot peintre. E-David (Drawing Apparatus for Vivid Image Display), robot de soudage tel que ceux utilisés dans les usines automobiles, a été affuble d’une caméra et d’un ordinateur. Le principe est que le travail de la machine n’étant jamais parfait, une boucle de contrôle est réalisée. Suite à la photographie de l’oeuvre, de nouveaux ordres sont transmis pour corriger les erreurs. Ce type d’optimisation est similaire à celui réalisé au cours du processus humain et est utilisée de façon itérative pour produire les distributions de couleurs. Les logiciels actuels utilisent des algorithmes, pour, à partir d’une image, imiter des styles picturaux. E-David utilisera de la vrai peinture sur de vraies toiles pour tester le processus de création. L’information sémantique est intégrée : un arbre sera peint différemment d’un visage. La plate-forme logicielle et matérielle sera ouverte aux artistes. Le robot servira à des expériences sur le mélange des couleurs et l’ordre des coups de pinceau.
Robot en travaux… de restauration

A Madrid, au musée Reina Sofia, un robot photographie des tableaux de Picasso ou de Juan Miro en se déplaçant lentement devant eux, sur des rails. Les images, prises en infrarouges et ultraviolets, aident les experts à analyser l’état de conservation des tableaux. Elles font apparaître les craquelures, les rayures, les couches de peinture et les retouches invisibles à l’oeil nu. Surnommé Pablito, le robot mesure 9 m de long et 3,5 m de haut. Il pèse 1,2 t et prend des milliers de photos de chaque toile, analysées par les ateliers de restauration du musée. Il permet de déterminer avec précision l’état du tableau, les problèmes qui existent ou comment il a été exécuté. Le musée a développé cette machine, d’un coût de 150000 €, en partenariat avec la société Telefonica. Le robot peut travailler 24 h sur 24 sans surveillance et se déplace avec une précision de 25 microns.
Robot urgentiste
Des chercheurs de l’Université de Waseda ont créé un robot d’imagerie médicale piloté par iPhone. Une personne accidentée peut souffrir d’une hémorragie interne. Aux urgences, une méthode de diagnostic surnommée FAST (Focused Assessment with Sonography for Trauma), employant l’imagerie par ultrasons permet de détecter les saignements internes. Cette méthode n’est applicable que lorsque le blessé arrive à l’hôpital. L’idée du projet est de placer un robot sur le corps du patient pendant son transfert à l’hôpital. Le médecin le contrôle à distance et peut détecter une éventuelle hémorragie. L’appareil pèse 2 kg et s’attache au niveau de la poitrine à l’aide d’une ceinture. Il faut disposer d’une connexion à Internet sans fil sur les lieux de l’accident ou pendant le trajet de l’ambulance. A partir de son iPhone, le médecin peut déplacer la sonde à ultrasons et en reçoit les images. En phase d’homologation, le robot sera utilisé pour faire des échographies de grossesses avant d’être commercialisé d’ici 2016.
Un tissus électrique
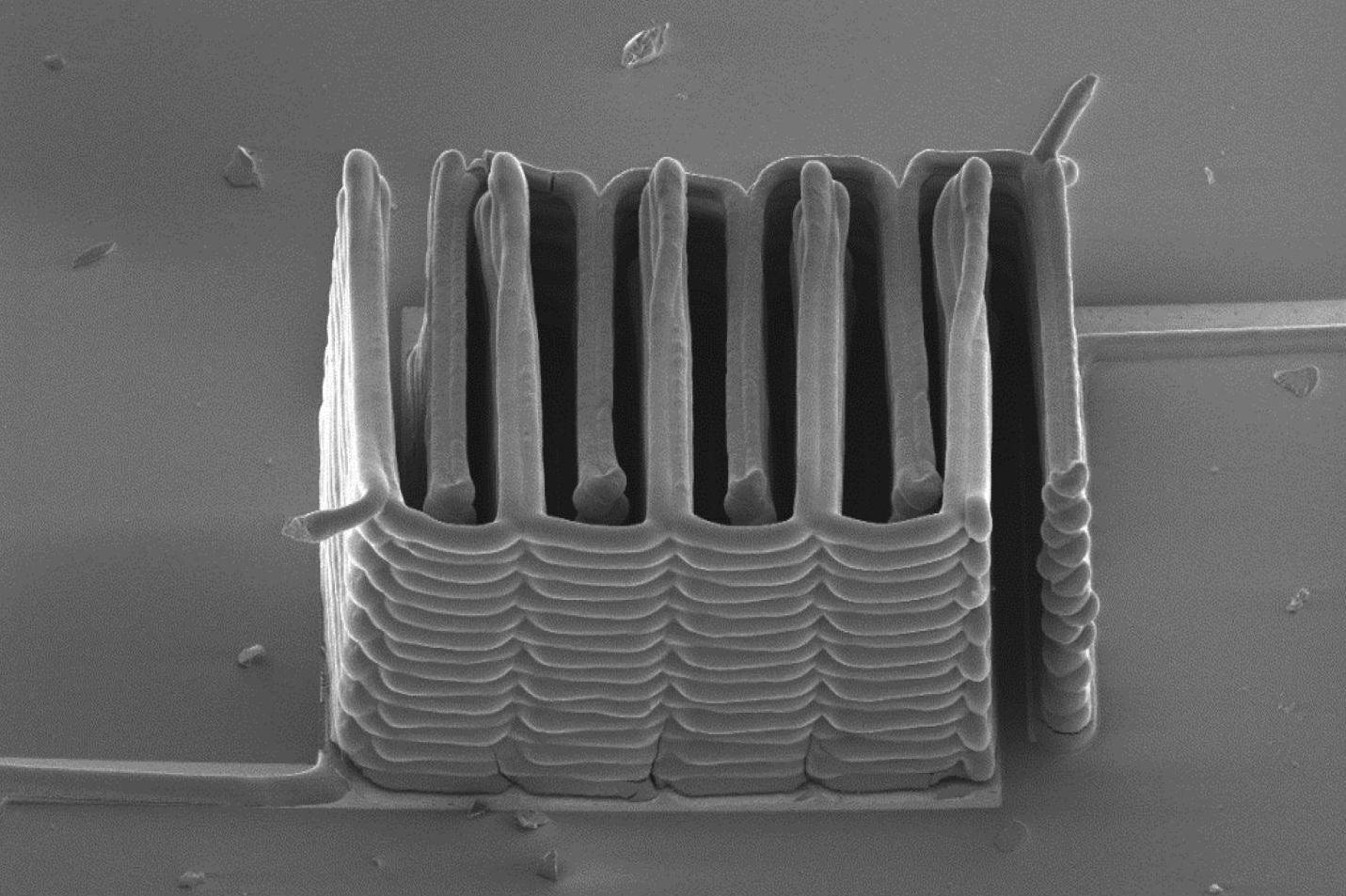
Les piles qui alimentent les appareils miniaturisés sont souvent aussi grandes qu’eux. Pour résoudre le problème, les fabricants déposent des couches minces pour construire les électrodes mais ces micro-piles solides contiennent peu d’énergie. Il est possible d’en contenir plus avec des électrodes entrelacées, d’une épaisseur inférieure à celle d’un cheveu. Des chercheurs de Harvard et de l’Université de l’Illinois utilisent l’impression 3D : ils créent des encres ayant diverses propriétés chimiques et les utilisent pour former des structures aux propriétés électroniques, optiques, mécaniques ou biologiques souhaitées. Pour les électrodes, les encres fonctionnent comme des matériaux électrochimiques et durcissent en couches aussi minces que celles empilées. L’imprimante dépose les encres sur les dents de deux peignes d’or, créant une pile d’anodes et de cathodes entrelacées, emballée dans un récipient minuscule rempli avec une solution électrolyte. La performance électrochimique est comparable à celle des batteries du commerce mais à toute autre échelle.
Il a ça dans le sang
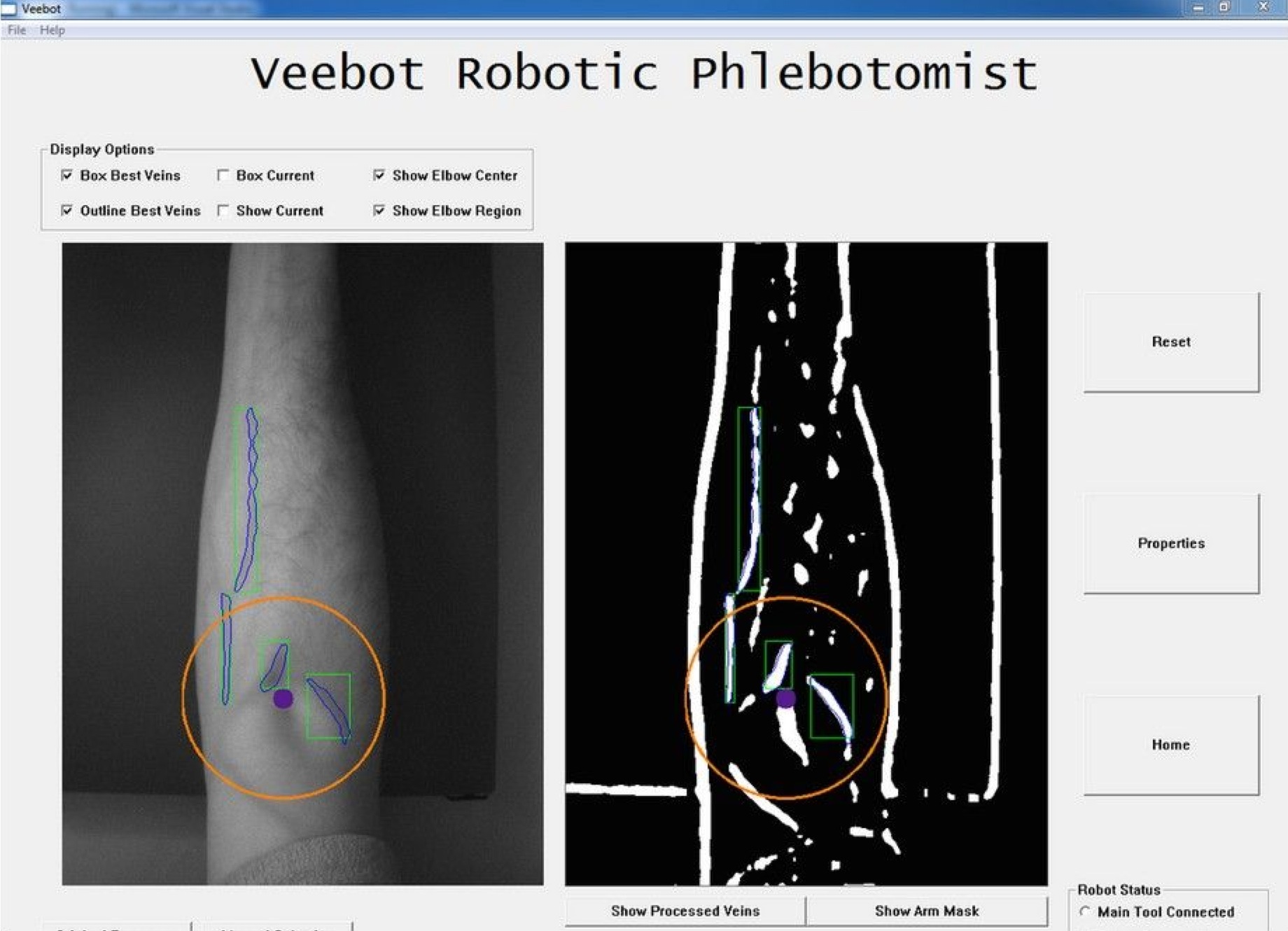
La société américaine Veebot a mis au point un robot capable de faire des prises de sang. Il serait plus rapide et plus précis qu’un humain et permettrait d’économiser de l’argent et du temps aux hôpitaux! Il se présente sous la forme d’un bras robotisé doté d’une caméra infrarouge et d’un émetteur à ultrasons. Le patient passe son bras dans un garrot et saisit une poignée pour mettre son bras en extension. Le brassard de pression sanguine rend les veines visibles. Il faut choisir une veine : La caméra infrarouge détecte une veine dans laquelle le sang coule suffisamment. L’émetteur ultrason permet de confirmer que le flux sanguin est suffisant. Une visée laser aligne l’aiguille et l’insére. Le robot pompe le sang. En une minute, il pique la meilleure veine dans 83% des cas. L’objectif est d’arriver à 90% pour entrer dans la phase d’essais cliniques. Selon les statistiques fournies par Veebot, il y aurait chaque année aux États-Unis 2 millions de blessures lors de prélèvements.
Petit boulot pour robot

Connaissez-vous les « human sign twirlers » ? Littéralement, « majorettes de panneau (humaines) », il s’agit, à Los Angeles, de personnes chargées de porter et lancer en l’air de petits panneaux publicitaires le long des routes, en dansant. Ce qui devait arriver est arrivé : les entreprises commencent à les remplacer par des mannequins automatisés capables de travailler 10 heures par jour sans se restaurer. La société Sign Waving Robot Co. fabrique des mannequins en plastique et les dépose sur le trottoir avec perruques, vêtements et batterie rechargeable. Chacun coûte 2000 $ ou peut être loué 30 $ par jour. L’entreprise en compte 500. Bien que les modèles masculins soient disponibles, les féminins représentent la grande majorité des ventes. Les porteurs de panneaux humains disent qu’ils ne voient pas les robots comme une menace. Christian Altamirano, directeur général du bureau Aarrow Connexion Spinners de Los Angeles déclare « Les membres de notre équipe sourient, dansent et interagissent avec le public, ils ont une présence plus forte qu’un robot. »